![]()
![]()
![]()
![]()
![]()
![]()
Program Guide
 |
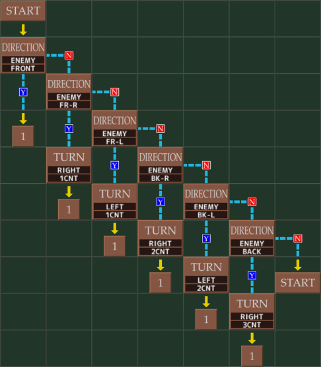
Start connector "START" |
 |
The process begins from the "START", Proceed as red arrow. |
 |
 |
Processing will shift from the jump connector, to the start connector of the same number. |
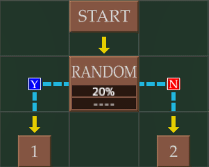 |
Branches to
YES in a probability of 20%, Branches to NO with 80% probability. |
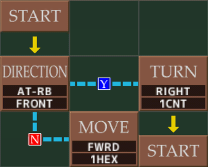 |
In DIRECTION AT-RB FRONT, it will examine whether there are things that interfere with the movement of the robot forward. |
 |
If you specify ENEMY, you can find out whether the enemy is present. FR-R is a front right direction, FR-L is a front left direction. |
Let your robot attack to the enemy. Add the process of attack if the enemy is in the front. This prima facie, is the completion of the program to be able to combat.
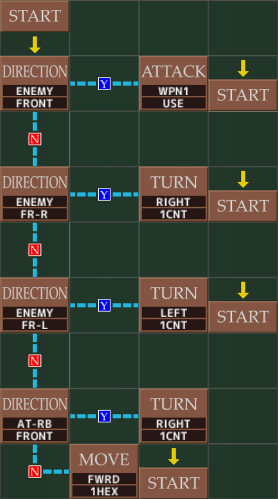 |
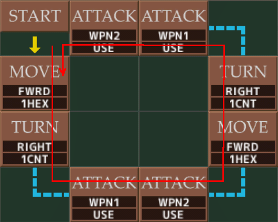
In "ATTACK WPN1 USE", use the weapon 1. |
 |
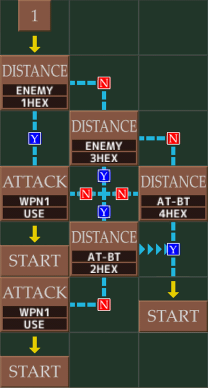 |
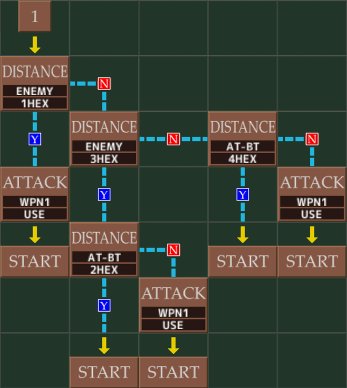
2 block reduction at
the merging line and the cross- line, ATTACK → START to share to 2 block reduction, a total of four blocks has been reduced. |
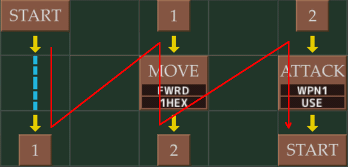
If the current block is the
start connectors , it transitions to block below .
If the current block is a jump connector , the
transition to start the connector of the same number .
If the start connector there is more than one , the transition to those close to the upper left .
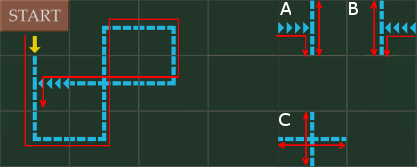
If the current block is a decision block and the result
is YES , the transition to YES line.
However, it does not return to the line passing
through.
If multiple YES lines are connected , the order of
priority is made down , right , left , up .
If the current block is a decision block and the result
is NO , the transition to NO line.
However, it does not return to the line passing
through.
If multiple NO lines are connected , the order of priority is made down , right , left , up .
The current block is the case of an instruction block (
don't branch ) , the transition destination is
determined in the following order .
If there is a jump connector below the current block
, the transition below.
When the line is connected to the current block, a transition to the line.
However, it does not return to the line passing
through.
If it does not meet the above , the transition to the
straight direction.